Collaborative robots, short cobots, are small industrial robotic arms, that are intented to work together with humans in a shared workspace. Due to the trend of customization in production towards batch size one, there is a need for new approaches and solutions that enable rapid adaptation to use cases with small lot sizes. One possible solution to relieve humans of monotonous tasks and to achieve productivity gains are collaborative robots.
An important question that arises by using cobots is how to allocate the tasks?
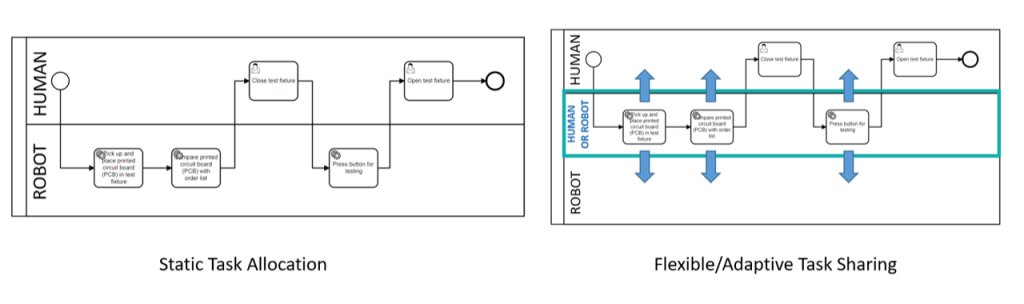
The state of the art shows static task allocation approaches in current assembly systems and flexible/adaptive task sharing (ATS) approaches in human factors research (Ranz et al. 2017, Schmidbauer 2022). Static task allocation means that the task assignment (human or robot) is defined once when the process is created. In comparison, when using adaptive task assignment, employees can change tasks from human to machine and vice versa at any time according to their own needs. Previous research results did not provide a clear insight into whether workers prefer static or adaptive task allocation and which tasks workers do prefer to assign to cobots (Gombolay et al. 2015).
Based on these findings, in this project we aimed to investigate workers' preferences in task allocation between humans and robots to better understand the design of future workplaces. In order to implement this as practice-oriented as possible, we conducted an experiment with 25 employees directly at Tele Haase Steuergeräte GmbH (a manufacturer of electronic components in Austria). There, we have implemented an existing, fully manual use case, that the workers perform in their normal workday, with the support of a cobot (see Figure 3).

After a short safety and setup briefing, the participants were randomly assigned to start with one of two task sharing settings, either a static task allocation, where tasks were pre-assigned to the cobot or themselves or an adaptive, self-determined task allocation, where the workers could decide on the task allocation themselves. Upon completion of first scenario, participants filled out a questionnaire and then continued with the second scenario. Finally, we conducted interviews asking about the participants’ experience.
Results
By applying the practice-oriented, workplace-based approach, 25 workers learned how to safely interact with a cobot and how to use it in their work environment to share tasks. In addition, we assessed their experience and gained remarkable human factors research insights. Our findings were that workers like to take over the decision-making authority of task allocation in human-robot interaction and their perceived control and competence is higher within the adaptive task-sharing scenario.